Алгоритм Бржозовского — различия между версиями
(→Заключение: обновил ссылку) |
|||
| Строка 2: | Строка 2: | ||
|definition = | |definition = | ||
Пусть дан [[Детерминированные_конечные_автоматы|автомат]] <tex>\mathcal{A}</tex>. Требуется построить автомат <tex>\mathcal{A}_{min}</tex> с наименьшим количеством состояний, распознающий тот же язык, что и <tex>\mathcal{A}</tex>. | Пусть дан [[Детерминированные_конечные_автоматы|автомат]] <tex>\mathcal{A}</tex>. Требуется построить автомат <tex>\mathcal{A}_{min}</tex> с наименьшим количеством состояний, распознающий тот же язык, что и <tex>\mathcal{A}</tex>. | ||
| + | }} | ||
| + | |||
| + | ==Описание== | ||
| + | Пусть <tex>q</tex> {{---}} состояние автомата <tex>\mathcal{A} = \langle \Sigma , Q, s \in Q, T \subset Q, \delta : Q \times \Sigma \to Q \rangle</tex>. | ||
| + | {{Определение | ||
| + | |definition= | ||
| + | '''Правым языком''' (англ. ''right language'') {{---}} называется язык <tex>L_d(q)</tex>, принимаемый автоматом <tex>\mathcal{A}_{d}(q) = \langle \Sigma , Q , q , T , \delta \rangle</tex>, полученным из <tex>\mathcal{A}</tex> путём добавления уникального начального состояния <tex>q</tex>. | ||
| + | }} | ||
| + | {{Определение | ||
| + | |definition= | ||
| + | '''Левым языком''' (англ. ''left language'') {{---}} называется язык <tex>L_g(q)</tex>, принимаемый автоматом <tex>\mathcal{A}_{g}(q) = \langle \Sigma , Q , q , T , \delta \rangle</tex>, полученным из <tex>\mathcal{A}</tex> путём добавления уникального терминального состояния <tex>q</tex>. | ||
| + | }} | ||
| + | |||
| + | {{Утверждение | ||
| + | |about=1 | ||
| + | |statement= | ||
| + | Автомат является детерминированным тогда и только тогда, когда левые языки его состояний попарно не пересекаются. | ||
| + | }} | ||
| + | |||
| + | {{Определение | ||
| + | |definition= | ||
| + | '''Обратное слово''' <tex>r(u)</tex> для слова <tex>u</tex> определяется следующим образом: <tex>r(\varepsilon) = \varepsilon</tex> и если <tex>u = u_1 u_2 u_3 \dotsc u_p</tex>, тогда <tex>r(u) = v_1 v_2 v_3 \dotsc v_p</tex>, где <tex>v_i = u_{p - i + 1}</tex>. | ||
| + | }} | ||
| + | |||
| + | {{Определение | ||
| + | |definition= | ||
| + | '''Обратный язык''' для языка <tex>L</tex> {{---}} язык <tex>r(L) = \{ u \mid r(u) \in L \}</tex> | ||
| + | }} | ||
| + | |||
| + | {{Определение | ||
| + | |definition= | ||
| + | '''Обратный автомат''' для автомата <tex>\mathcal{A} = \langle \Sigma , Q , S , T , \delta \rangle</tex> {{---}} автомат <tex>r(\mathcal{A}) = \langle \Sigma , Q , T , I , r(\delta) \rangle</tex>, полученный из <tex>\mathcal{A}</tex> сменой местами начальных и конечных состояний и сменой направлений переходов. | ||
| + | }} | ||
| + | |||
| + | {{Утверждение | ||
| + | |about=2 | ||
| + | |statement= | ||
| + | Если <tex>\mathcal{A}</tex> распознает язык <tex>L</tex>, то <tex>r(\mathcal{A})</tex> распознает <tex>r(L)</tex>. | ||
| + | }} | ||
| + | |||
| + | {{Утверждение | ||
| + | |about=3 | ||
| + | |statement= | ||
| + | Если левый язык состояния <tex>q</tex> в <tex>\mathcal{A}</tex> {{---}} <tex>L_g(q)</tex>, тогда его левый язык в <tex>r(A)</tex> {{---}} <tex>L_d(q)</tex>. Аналогично для правого языка <tex>q</tex>. | ||
}} | }} | ||
Версия 18:08, 16 октября 2016
| Задача: |
| Пусть дан автомат . Требуется построить автомат с наименьшим количеством состояний, распознающий тот же язык, что и . |
Содержание
Описание
Пусть — состояние автомата .
| Определение: |
| Правым языком (англ. right language) — называется язык , принимаемый автоматом , полученным из путём добавления уникального начального состояния . |
| Определение: |
| Левым языком (англ. left language) — называется язык , принимаемый автоматом , полученным из путём добавления уникального терминального состояния . |
| Утверждение (1): |
Автомат является детерминированным тогда и только тогда, когда левые языки его состояний попарно не пересекаются. |
| Определение: |
| Обратное слово для слова определяется следующим образом: и если , тогда , где . |
| Определение: |
| Обратный язык для языка — язык |
| Определение: |
| Обратный автомат для автомата — автомат , полученный из сменой местами начальных и конечных состояний и сменой направлений переходов. |
| Утверждение (2): |
Если распознает язык , то распознает . |
| Утверждение (3): |
Если левый язык состояния в — , тогда его левый язык в — . Аналогично для правого языка . |
Алгоритм
Описание
Алгоритм минимизации конечных автоматов Бржозовского (Janusz A. (John) Brzozowski) выделяется, по крайней мере, следующими качествами:
- Он элегантен и весьма оригинален.
- Он эффективен.
- Он работает даже с недетерминированными конечными автоматами.
Обладая обычными процедурами обращения и детерминизации конечного автомата, мы, с помощью идеи Бржозовского, можем немедленно приступить к минимизации заданного автомата. Для этого надо дважды провести его через обе вышеуказанные процедуры:
, где
- это исходный КА,
- это процедура обращения КА,
- это процедура детерминизации КА,
- это минимизированный КА.
Корректность
Корректность алгоритма доказана в работе[1]
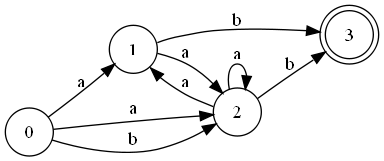
Пример работы
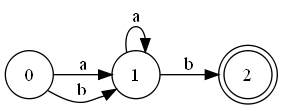
- Исходный НКА ():
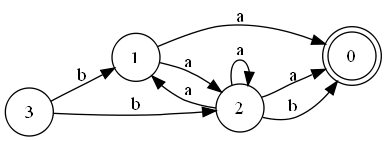
- Первый шаг алгоритма ():
- Второй шаг алгоритма ():
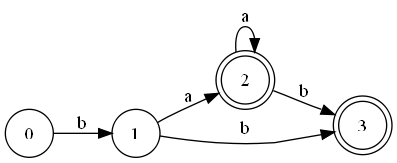
переименовывает состояния, после этого всегда является начальным состоянием - Третий шаг алгоритма ():
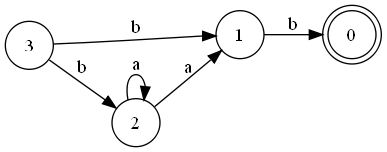
После выполнения этого шага алгоритма оба состояния и являются начальными. - Заключительный шаг алгоритма ():





Заключение
Самым эффективным алгоритмом минимизации принято считать алгоритм Хопкрофта, который, как и прочие традиционные алгоритмы, работает только с ДКА. Его асимптотическое время выполнения зависит от логарифма исходных данных. С другой стороны очевидно, что алгоритм Бржозовского в худшем случае будет обладать экспоненциальным временем выполнения, ведь этого требует процедура детерминизации, выполняемая дважды. На практике же наблюдается парадокс, алгоритм Бржозовского во многих случаях опережает прочие подходы к минимизации, включая и алгоритм Хопкрофта. В работе[2], сравнивающей оба алгоритма, показано, что алгоритм Бржозовского оказывается эффективнее алгоритма Хопкрофта для автоматов с большим числом переходов.
См. также
- Минимизация ДКА, алгоритм за O(n^2) с построением пар различимых состояний
- Минимизация ДКА, алгоритм Хопкрофта (сложность O(n log n))