| Определение: |
Прямым произведением двух ДКА [math]A_1 = \langle \Sigma, Q_1, s_1, T_1, \delta_1 \rangle[/math] и [math]A_2 = \langle \Sigma, Q_2, s_2, T_2, \delta_2 \rangle[/math] называется ДКА [math]A = \langle \Sigma, Q, s, T, \delta \rangle[/math], где:
- [math]Q = Q_1 \times Q_2,[/math]
- [math]s = \langle s_1, s_2 \rangle,[/math]
- [math]T = T_1 \times T_2,[/math]
- [math]\delta(\langle q_1, q_2 \rangle, c) = \langle \delta_1(q_1, c), \delta_2(q_2, c) \rangle.[/math]
|
Пример

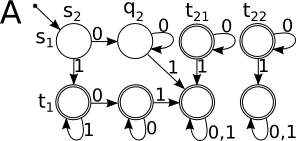
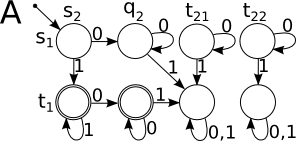
Возьмем автомат [math]A_1 = \langle \Sigma = \lbrace 0, 1 \rbrace, Q_1 = \lbrace s_1, t_1 \rbrace, s_1, T_1 = \lbrace t_1 \rbrace, \delta_1 \rangle[/math], и автомат [math]A_2 = \langle \Sigma = \lbrace 0, 1 \rbrace, Q_2 = \lbrace s_2, q_2, t_{21}, t_{22} \rbrace, s_2, T_2 = \lbrace t_{21}, t_{22} \rbrace, \delta_2 \rangle[/math].
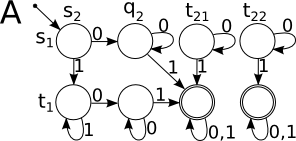
Автомат [math]A = \langle \Sigma, Q, s, T, \delta \rangle[/math] будет их пересечением.
Согласно определению:
- [math]\Sigma = \lbrace 0, 1 \rbrace[/math]
- [math]Q = \lbrace \langle s_1, s_2 \rangle, \langle s_1, q_2 \rangle, \langle s_1, t_{21} \rangle, \langle s_1, t_{22} \rangle, \langle t_1, s_2 \rangle, \langle t_1, q_2 \rangle, \langle t_1, t_{21} \rangle, \langle t_1, t_{21} \rangle \rbrace[/math]
- [math]s = \langle s_1, s_2 \rangle[/math]
- [math]T = \lbrace \langle t_1, t_{21} \rangle, \langle t_1, t_{22} \rangle \rbrace[/math]
- [math]\delta :[/math]
- [math]\delta(\langle s_1, s_2 \rangle, 0) = \langle \delta_1(s_1, 0), \delta_2(s_2, 0) \rangle = \langle s_1, q_2 \rangle [/math]
- [math]\delta(\langle s_1, s_2 \rangle, 1) = \langle \delta_1(s_1, 1), \delta_2(s_2, 1) \rangle = \langle t_1, s_2 \rangle [/math]
- [math]\delta(\langle s_1, q_2 \rangle, 0) = \langle \delta_1(s_1, 0), \delta_2(q_2, 0) \rangle = \langle s_1, q_2 \rangle [/math]
- [math]\delta(\langle s_1, q_2 \rangle, 1) = \langle \delta_1(s_1, 1), \delta_2(q_2, 1) \rangle = \langle t_1, t_{21} \rangle [/math]
- ...
Применение
Изменив конструкцию, можно получить автомат допускающий разность или объединение двух языков.
Объединение ДКА
Необходимо разрешать любую цепочку удовлетворяющую первому или второму автомату, для этого пометим терминальными следующие вершины [math]T = (T_1 \times Q_2) \cup (Q_1 \times T_2)[/math]. Полученный автомат удовлетворяет нашим требованиям так как попав в какое-либо состояние из [math]T_1[/math] или [math]T_2[/math], цепочка начинает удовлетворять первому или второму автомату соответственно.
Разность ДКА
Рассмотрим автомат [math]\overline{M} = \langle \Sigma , Q , s , Q \setminus T , \delta \rangle [/math], то есть автомат [math]M[/math], в котором терминальные и нетерминальные состояния инвертированы. Очевидно, он допускает те и только те слова, которые не допускает автомат [math]M[/math], а значит, задаёт язык [math]\overline{M}[/math]. Таким образом, [math]\overline{M}[/math] — регулярный.
Заметим, что если [math]L[/math] и [math]M[/math] - регулярные языки, то [math]L \setminus M = L \cap \overline{M}[/math] - так же регулярный.
Таким образом надо построить пересечение двух автоматов, предварительно инвертировав во втором терминальные и нетерминальные состояния. Заметим, что меняется только набор терминальных вершин, следовательно заменим их в итоговой конструкции произведения ДКА на [math]T = T_1 \times (Q_2 \setminus T_2)[/math].



