Материал из Викиконспекты
| Определение: |
| Пусть [math]G[/math] — произвольный граф. Превратим каждое его ребро в дугу, придав ребру одно из двух возможных направлений. Полученный орграф на том же самом множестве вершин будем называть ориентацией графа [math]G[/math]. |
| Лемма: |
|
| Доказательство: |
| [math]\triangleright[/math] |
|
При умножении [math]i[/math]-й строки исходной матрицы [math]I[/math] на [math]j[/math]-й столбец транспонированной матрицы [math]I^T [/math] перемножаются [math]i[/math]-я и [math]j[/math]-я строки исходной матрицы. При умножении [math]i[/math]-й строки на саму себя на диагонали полученной матрицы получится сумма квадратов элементов [math]i[/math]-й строки, которая равна, очевидно, [math]\deg(v_i)[/math]. Пусть теперь [math]i \ne j[/math]. Если [math] (v_i, v_j) \in E [/math], то существует ровно одно ребро, соединяющее [math] v_i [/math] и [math] v_j [/math], следовательно результат перемножения [math]i[/math]-й и [math]j[/math]-й строк равен [math]-1[/math], в противном случае он равен [math]0[/math] в силу отсутствия ребра, инцидентного обеим вершинам. Определенная данными условиями матрица и является матрицей Кирхгофа. |
| [math]\triangleleft[/math] |
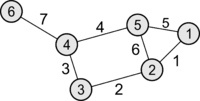
| Граф
|
Матрица Кирхгофа
|
Матрица инцидентности
|
|
[math]\left(\begin{array}{rrrrrr}
2 & -1 & 0 & 0 & -1 & 0\\
-1 & 3 & -1 & 0 & -1 & 0\\
0 & -1 & 2 & -1 & 0 & 0\\
0 & 0 & -1 & 3 & -1 & -1\\
-1 & -1 & 0 & -1 & 3 & 0\\
0 & 0 & 0 & -1 & 0 & 1\\
\end{array}\right)[/math]
|
[math]\begin{pmatrix}
1 & 0 & 0 & 0 & 1 & 0 & 0\\
1 & 1 & 0 & 0 & 0 & 1 & 0\\
0 & 1 & 1 & 0 & 0 & 0 & 0\\
0 & 0 & 1 & 1 & 0 & 0 & 1\\
0 & 0 & 0 & 1 & 1 & 1 & 0\\
0 & 0 & 0 & 0 & 0 & 0 & 1\\
\end{pmatrix}[/math]
|
- Асанов М., Баранский В., Расин В. — Дискретная математика: Графы, матроиды, алгоритмы — Ижевск: ННЦ "Регулярная и хаотическая динамика", 2001, 288 стр.
